

Ich habe mir einen Arduino zugelegt und will damit ein paar Sachen ausprobieren, denn als Softwareentwickler kann man ja auch mal sowas ausprobieren :) Heute will ich einen Schrittmotor bewegen und evtl. mittels Poti noch steuerbar machen.
Als erstes, ich habe mir ein Bastelset bei Amazon von dem Funduino bestellt, wo unter anderem auch ein Schrittmotor drin ist. Ein Entsprechendes Tutorial habe ich direkt von der Funduino Seite genommen und etwas umgeschrieben, werde aber meine eigenen Fotos benutzen. Also als erstes habe ich das Bauteil 28BYJ-48 von ROHS genommen, was der Schritt motor ist. Dazu wurde eine Motorsteuerplatte geliefert, die wir nun an den Arduino anschließen.
Die Anschlüsse sind wie folgt gemacht:
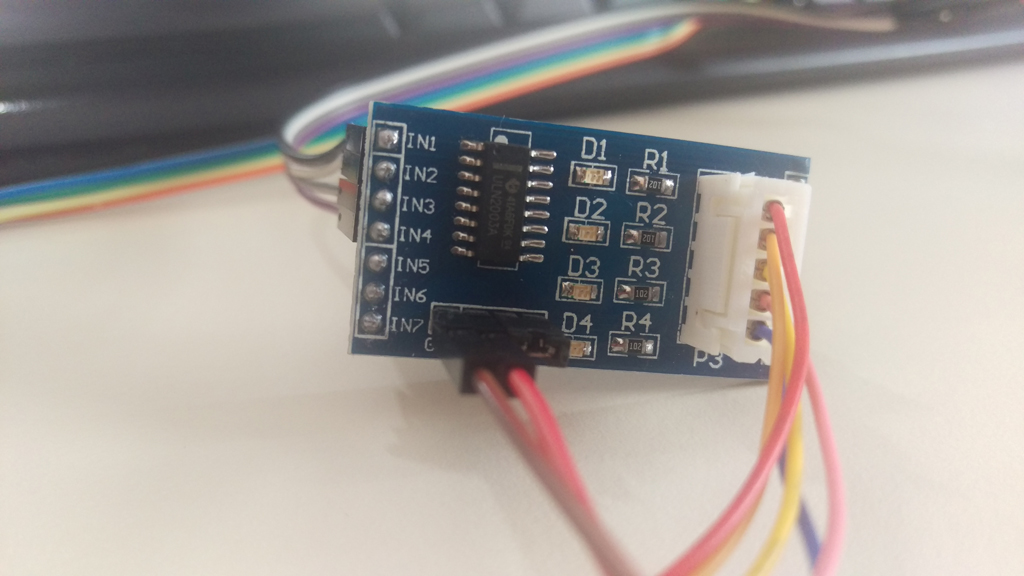
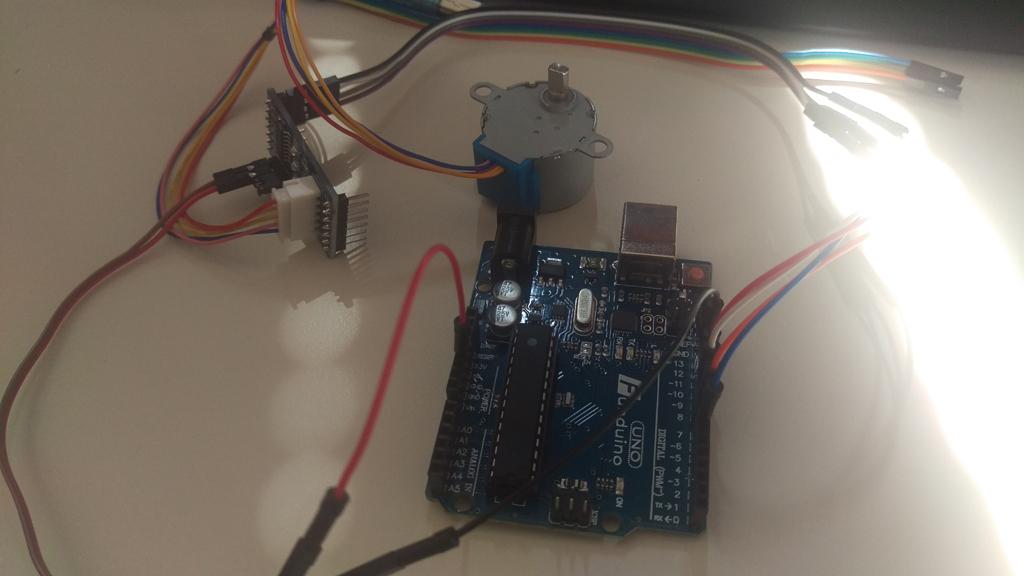
In1 und In2 müssen am Arduino Board an PWM Anschlüsse angeschlossen werden und In3 und In4 wird auf normale Digitale Anschlüsse angeschlossen. Hier im Beispiel habe ich es wie folgt angeschlossen:
In1 -> Pin10
In2 -> Pin11
In3 -> Pin7
In4 -> Pin8
Weiterhin muss die Motorsteuerplatine mit Strom versorgt werden. Hierfür wird GND auf GND geschaltet (welche Wunder :) ) und VCC auf 5V auf unserer Arduino Platine.
Damit sind die Anschlüsse soweit durch. Jetzt kommt die Software. Hierfür binden wir als erstes die Klasse Stepper.h ein, die wir für unseren Schrittmotor verwenden. Hier gibt es mehrere Einstellungsmöglichkeiten in der Stepper Klasse, die für jeden Schrittmotor unterschiedlich sind. Zum einen die Steps und die RPM.
Wie das genau bei eurem Motor ist, müsst ihr euch selbst erkundigen oder einfach ausprobieren.
#include <Stepper.h>
int steps = 32;
int rpm = 700;
Stepper hotStepper(steps,8,11,7,10);
void setup() {
hotStepper.setSpeed(rpm);
}
void loop(){
hotStepper.step(2048);
hotStepper.step(-2048);
}Wenn alles funktioniert, dreht sich der Motor einmal komplett um 360° und einmal zurück. Wie man in die Vorhandene Schaltung einen Knopf einbaut, damit der Motor sich bei jedem Knopfdruck einmal dreht, werde ich das nächste mal machen. Also seid gespannt!